What does a spinal cord injury (SCI) produce?
-Produces both paralysis and sensory loss below the level of the lesion Paralysis is of voluntary muscle • Autonomic functions also disturbed: • Bladder and bowel voiding • Sexual function • Cardiovascular function • Sweating
What are the features/damage in the SCI?
-most of the nervous system is ok -it is a connectivity problem 1. Cortex, basal ganglia and cerebellum still completely intact 2. All ventral horn motor neurons intact 3. Connections to skeletal muscle intact 4. “Only” cuts connection between brain and ventral horn motor neurons
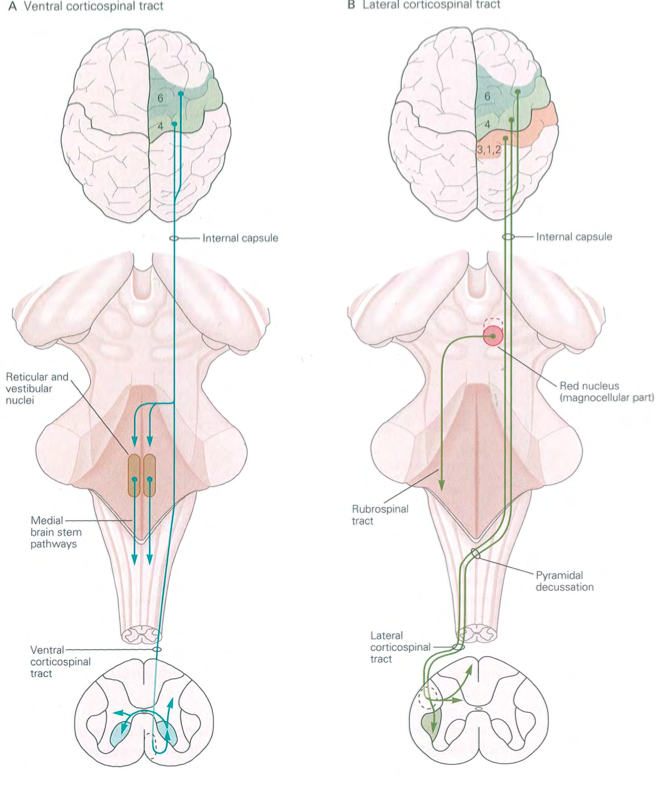
How is movement controlled?
- Postural control from cortex via medial corticospinal tract and reticular formation
- Fine motor control via cortex and lateral corticospinal tract
- Final motor neurons in ventral horn of SC
What are the prosthetic devices about?
• Can we use a computer to replace missing link between brain and spinal cord? • Examples of prosthetic neural devices (Neural Interface Systems - NIS) already in widespread use
What are two examples of neural prostheses already in use (non-walk related)?
1: Bionic ear, 50,000 in US • For middle ear hearing problems 2: Deep brain stimulators, 30,000 in US • For treatment of Parkinson’s disease (can control the tremor)
Do SCI patients produce motor patterns?
• SCI patients still produce motor patterns • Can we intercept signals and use them to aid mobility?
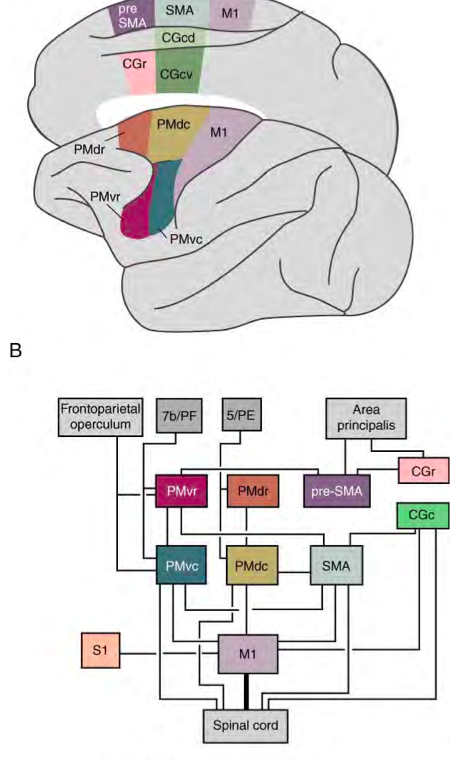
How are motor patterns generated? And what is the best place to eavesdrop?
- Motor patterns result of input from large area of frontal lobe
- Distinct regions involved
- Most converge on M1 – last stage before SC and motor neurons (the best place to eavesdrop on)
What is the topography of M1?
- Motor pattern spatially encoded
- we can see which part controls which part of the body
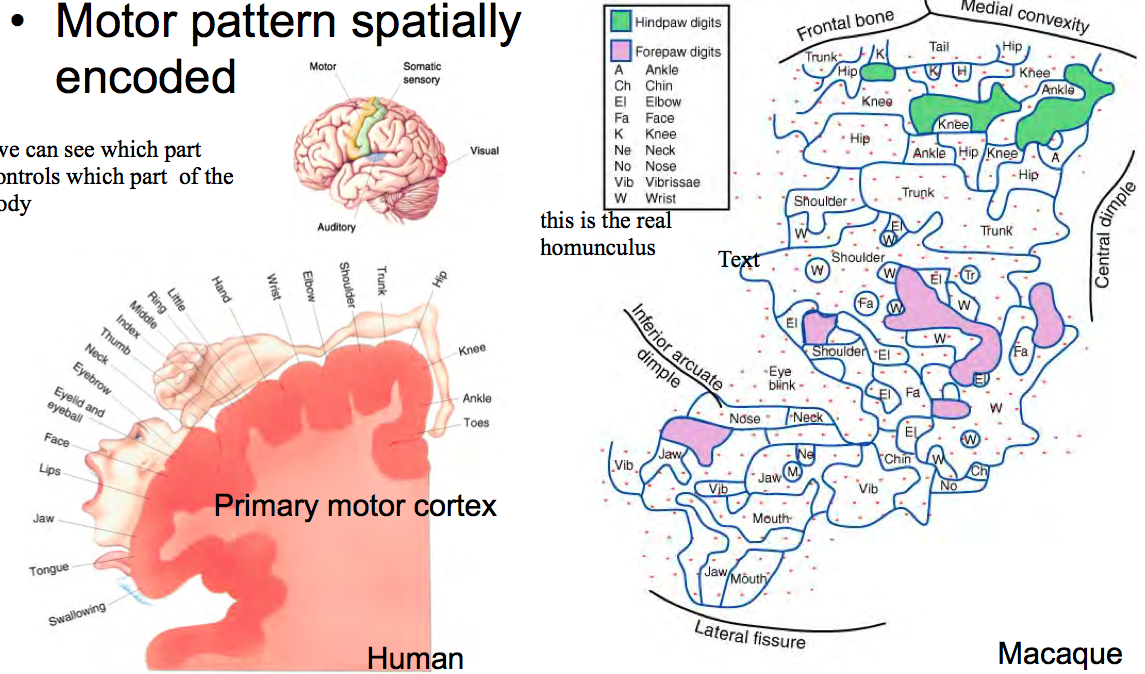
What is the motor pattern like in M1?
• Motor pattern also electrically encoded • Each movement results from pattern of action potentials in specific subpopulations of neurons distributed through M1 • Movement of an arm involves postural stabilisation along with graded activation of flexor and extensor muscles in a specific sequence -can you just sum up the APs?
How can the interface with the cortex work? What are the technical issues?
• Can we listen in to neural activity in the brain and decode the motor patterns? • Need to record signals (thousands?), 1ms duration, 1-300Hz, in mV range, over a significant area • Might substitute local field potentials (sum of all local currents caused by action of multiple neurons)
What is Study 1 about?
-Cortical control of a prosthetic arm for self-feeding -training a monkey to use a robotic arm -get reward when using the arm
What is the design of study 1?
• Used monkeys (Macaques) • Recorded from M1 and “decoded” motor signal • Use signal to drive a robot arm (4 joints and a set of “fingers”) • Can monkey feed itself using only prosthesis?
What was the monkey training like in study 1?
• Monkey trained to feed itself using a joystick to control robot arm • Forms mental image of how the arm can move and get used to feeding with it • NIS implanted in cortex to record motor signals • NIS connected to robot arm • Computer algorithm links brain activity to robot arm movement
What is the brain interface that was used in study 1?
• 96 electrode array • Skull mounted multi-pin electrical connector • Samples area 3.5 mm2 • Electrodes penetrate 1 mm below cortical surface
Where to put the interface? (study 1)
• Aim to put interface into M1 over hand/forearm representation • Requires brain surgery –put it into the arm region -brain surgery and put it in
What is the outcome of study 1?
• Monkey behaves as if it has a third arm • Crude but effective -this is in a monkey not a human!
What is study 2 about?
-Neuronal ensemble control of prosthetic devices by a human with tetraplegia • Volunteer (MN) is quadriplegic with high cervical SCI • Device implanted over hand/forearm representation
What was the target for the interface in study 2?
• Identified hand and arm region in primary motor cortex on anatomical grounds, -the thing sticking out of his head
What is the transform function (study 2)?
-record APs when imagining movement then computer builds an algorithm • Linked brain activity to an output by building a linear filter (transform function) • Asked MN to imagine moving cursor to track screen prompt • “Linear filters were constructed from a response matrix containing the firing rate over a 1-s history for each neuron (twenty 50-ms bins), and regressing this matrix onto technician-cursor position using a pseudoinverse technique.”
What was the outcome of study 2?
• 4 min of data analysed • Filter constructed during this time • Put to use immediately (no practice effect!) • Linked to MN driven cursor, asked to track prompt again -successful but crude also can’t have the implant for long
What is the study 3 about?
-High-performance neuroprosthetic control by an individual with tetraplegia -• 52 y old women • Spinocerebellar degeneration • Injury motor complete (0/5) (no motor function) -similar to the monkey
What is the other approach to trying to repair spinal cord surgery?
• Robots can replace body • But paraplegics have intact muscle/ skeletal system • Can stimulate muscle contraction through skin or by implantable electrodes • Restore movement to paraplegics
What is study 4 about?
-Implantable FES system for upright mobility and bladder and bowel function for individuals with spinal cord injury. -the machine on belt and activate muscles
What is the system like in study 4?
• From Cochlear Pty Ltd • 22 electrodes surgically implanted on muscle or nerves • Stimulator has pre- programmed muscle stimulation sequences • Push-button control • No feed-back control -muscles to walk, stand, sit -preprogrammed motor patterns in the device on their belt, can push= walk, sit, upstairs etc.

-
Lecture 2- Learning and Memory I23
-
Lecture 3- Cellular and molecular mechanisms mediating learning and memory27
-
Lecture 4- Brain disorders involving deficits of learning and memory33
-
Lecture 5- Sleep61
-
Lecture 6- Numbers and the brain34
-
Lecture 7- Output targets of ganglion cells24
-
Lecture 8- Cortical processing of vision32
-
Lecture 9- Neuroscience of language46
-
Lecture 10- Reading and object recognition41
-
Lecture 11- Neuroscience of emotion I36
-
Lecture 12- Neuroscience of emotion II36
-
Lecture 13- Reading and object recognition II46
-
Lecture 14- The musical brain24
-
Lecture 17- Mental disease I41
-
Lecture 18- Mental disease II47
-
Lecture 19- Pain26
-
Lecture 20- Addiction46
-
Lecture 21- Aging brain59
-
Lecture 22- Neural prostheses38
-
Lecture 23- The Glial Brain26
-
Lecture 24- Epilepsy12
-
Lecture 15- Respiratory circuits II35
